|
| Publications:
All (Google Scholar),
in pictures, or by area of
interest: |
| |
multi-agent
systems, model
predictive
control, hybrid
systems
multi-vessel systems,
sustainability,
synchromodality
logistics,
intermodal transport,
container transport
transport over water,
control of ships
transportation networks, inter-terminal transport
water
networks,
power networks,
gas networks
|
 |
|
|
|
Books |
| |
| 1. |
R.B. Larsen, O.J. Rodseth, R.R. Negenborn (Eds.). International Conference on Maritime Autonomous Surface Ships (ICMASS 2023), Journal of Physics: Conference Series 2618(2023), IOP Publishing Ltd, England, 2023.

|
| 2. |
B. Ranjbar-Sahraei, R.R. Negenborn. Research Positioning & Trend Identification -- A data-analytics toolbox, Delft University of Technology, 2017.
|
| 3. |
F. Corman, S. Voss, R.R. Negenborn (Eds.). Computational Logistics, Springer International Publishing, Switzerland, 2015. ISBN: 978-3-319-24263-7.

|
| 4. |
C. Ocampo-Martinez, R.R. Negenborn (Eds.). Transport of Water versus Transport over Water, Springer International Publishing, Switzerland, 2015. ISBN: 978-3-319-16132-7.
|
| 5. |
J.M. Maestre, R.R. Negenborn (Eds.). Distributed Model Predictive
Control Made Easy, Springer, Dordrecht, The Netherlands, 2014. ISBN: 978-94-007-7005-8.
|
| 6. |
R.R. Negenborn, Z. Lukszo, H. Hellendoorn (Eds.). Intelligent
Infrastructures, Springer, Dordrecht,
The Netherlands, 2010. ISBN: 978-90-481-3597-4.
|
|
|
|
Journal publications (latest) |
| |
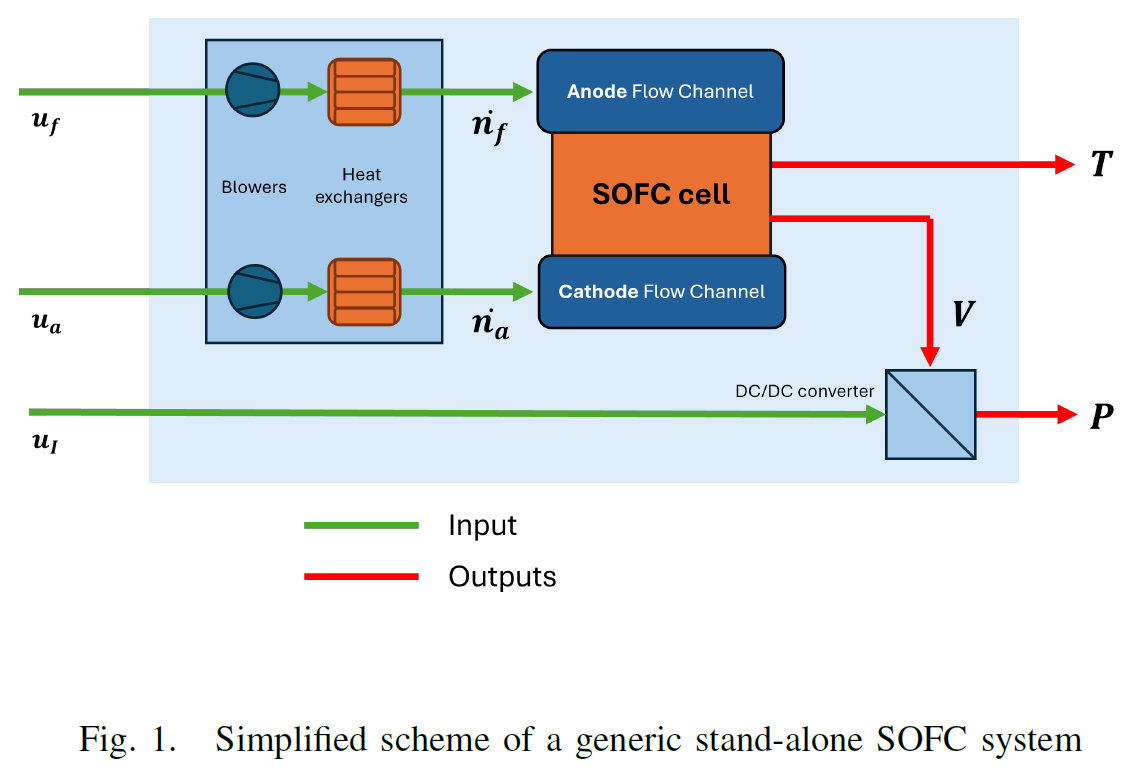
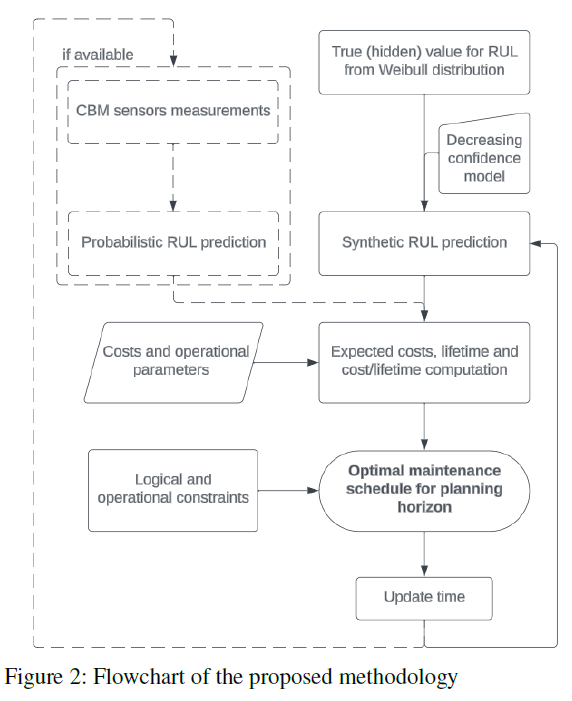
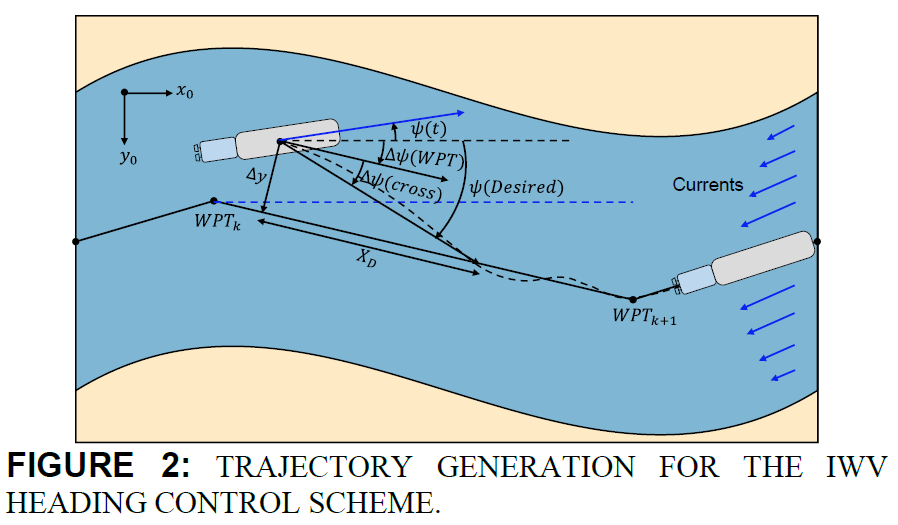
| 152. | Energy-efficient formation control of multi-vessel systems under environmental disturbances. X. Xiong, R.R. Negenborn, Y. Pang. Accepted for publication in Ocean Engineering, 2026. Open access. | | | 151. | Model predictive control for spatial-temporal temperature gradient constrained dynamic operation of a marine SOFC system. M.H. de Lange, P. Segovia, R.R. Negenborn, L. van Biert. Journal of Power Sources, vol. 685, no. 240440, September 2026. Open access. | | 150. | Stochastic optimization of predictive maintenance scheduling for offshore wind farms. M. Borsotti, R.R. Negenborn, X. Jiang. Ocean Engineering, vol. 357, Part 2, no. 125424, June 2026.  | | | 149. | Review of deep reinforcement learning for offshore wind farm maintenance planning. M. Borsotti, X. Jiang, R.R. Negenborn. Wind Energy Science, vol. 11, pp. 1185-1204, 2026. Open access. | | 148. | Robust vessel maneuvering modelling using set-membership identification. A. Dhyani, A. Tsolakis, K. van der El, R.R. Negenborn, V. Reppa. Control Engineering Practice, vol. 173, no. 106936, August 2026. Open access. | | | 147. | Distributed MPC for autonomous ships on inland waterways with collaborative collision avoidance. H. Anh Tran, T.A. Johansen, R.R. Negenborn. Ocean Engineering, vol. 353, Part 2, no. 124802, April 2026. | | 146. | Model predictive formation control of multi-vessel systems considering ship-to-ship interaction. X. Xiong, R.R. Negenborn, Y. Pang. Journal of Marine Science and Technology, 2026. Open access. | | | 145. | Energy efficient formation control of multi-vessel systems via hydrodynamics-aware configuration optimization. X. Xiong, R.R. Negenborn, Y. Pang. Applied Ocean Research, vol. 166, no. 104907, January 2026. | | 144. | Multiple sensor fault diagnosis for safe navigation of autonomous surface vessels. A. Dhyani, K. van der El, R.R. Negenborn, V. Reppa. Control Engineering Practice, vol. 168, no. 106673, March 2026. Open access. | | | 143. | A review of multi-horizon decision-making for operation and maintenance of fixed-bottom offshore wind farms. M. Borsotti, R.R. Negenborn, X. Jiang. Renewable and Sustainable Energy Reviews, vol. 226, Part E, no. 116450, January 2026. Open access. | | 142. | Model predictive control for thermal stress-aware power modulation of solid oxide fuel cell systems. M.H. de Lange, P. Segovia, R.R. Negenborn, L. van Biert. Energy Conversion and Management, vol. 347, no. 120395, January 2026. Open access. | | | 141. | Impact of speed planning for inland vessels with alternative power systems on energy efficiency and emissions. S. Slagter, M. Jiang, Y. Pang, K. Visser, M. van Koningsveld, R.R. Negenborn. Energy Conversion and Management: X, vol. 28, no. 101223, October 2025. Open access. | | 140. | Experimental trust dynamics modelling in supervised autonomous ship navigation in collision avoidance scenarios. R. Song, E. Papadimitriou, R.R. Negenborn, P.H.A.J.M. van Gelder. Transportation Research Interdisciplinary Perspectives, vol. 34, no. 101634, November 2025. Open access. | | | 139. | Asynchronous distributed collision avoidance with intention consensus for inland autonomous ships. H. Anh Tran, N. Lauvas, T.A. Johansen, R.R. Negenborn. IEEE Transactions on Control Systems Technology, vol. 33, no. 6, pp. 2410-2425, November 2025. | | 138. | Collaborative platooning and routing for mixed fleets of electric automated vehicles and conventional trucks. N. Pourmohammadzia, R.R. Negenborn, F. Schulte. Accepted for publication in International Transactions in Operational Research, 2025. Open access. | | | 137. | Evaluation of novel inland waterway transport concepts for moving freight effectively. P. Shobayo, F. Bedoya-Maya, A. Nicolet, E. van Hassel, B. Atasoy, T. Vanelslander, R.R. Negenborn. Maritime Economics & Logistics, 2025. | | 136. | Nonlinear model predictive control for path following of autonomous inland vessels in confined waterways. C. Zhang, A. Dhyani, J.W. Ringsberg, R.R. Negenborn, V. Reppa. Ocean Engineering, 2025. Open access. | | | 135. | An intelligent agent-based resilient framework for marine vessel mission adaptations. N. Kougiatsos, E.L Scheffers, M.C. van Benten, D.L. Schott, P. de Vos, R.R. Negenborn, V. Reppa. IEEE Open Journal of Intelligent Transportation Systems, vol. 6, pp. 184-203, 2025. Open access. | | 134. | Dynamic coordination of multiple movable bridges and vessels for time-efficient inland waterway navigation. P. Segovia, V. Puig, R.R. Negenborn, V. Reppa. IEEE Transactions on Intelligent Transportation Systems, vol. 26, no. 4, pp. 5481-5493, April 2025. | | | 133. | Enhancing collision avoidance in mixed waterborne transport: Human-mimic navigation and decision-making by autonomous vessels. R. Song, E. Papadimitriou, R.R. Negenborn, P.H.A.J.M. van Gelder. Ocean Engineering, vol. 322, no. 120443, April 2025. Open access. |
|
|
| Conference papers (latest) |
| |
| 188. | Modeling, parameter identification and nonlinear control of a Proton Exchange Membrane fuel cell for maritime use. H. Ege Ceyhun, U. Shipurkar, L. van Biert, R.R. Negenborn, A. Coraddu. Accepted for the 23rd IFAC World Congress (IFAC WC'26), Busan, Republic of Korea, August 2026. | | | 187. | Robust vessel maneuvering modelling using set-membership identification. A. Dhyani, A. Tsolakis, K. van der El, R.R. Negenborn, V. Reppa. Accepted for the 23rd IFAC World Congress (IFAC WC'26), Busan, Republic of Korea, August 2026. | | 186. | System configuration spaces: From legacy
factories to factories of the Future. R. Leite Patrao, R.R. Negenborn, A. Napoleone. Accepted for the 23rd IFAC World Congress (IFAC WC'26), Busan, Republic of Korea, August 2026. | | | 185. | Stochastic output-feedback MPC for safe
and energy-efficient SOFC operation
subject to marine disturbances. M.H. de Lange, P. Segovia, R.R. Negenborn, L. van Biert. Accepted for the 23rd IFAC World Congress (IFAC WC'26), Busan, Republic of Korea, August 2026. | | 184. | Remaining useful life prediction of solid oxide fuel cells using moving horizon estimation. A. Caspani, R.R. Negenborn, V. Reppa. Accepted for the 6th International Conference on Control and Fault-Tolerant Systems (SysTol) (SysTol 2025), Ayia Napa, Cyprus, October 2025. | | | 183. | Stochastic model predictive control of supply chains of perishable goods. F.P. Bernardini, J.M. Maestre, P. Velarde, R.R. Negenborn. Accepted for the Joint 9th IFAC Symposium on System Structure and Control, 19th IFAC Workshop on Time Delay Systems, and 2nd IFAC Workshop on Control of Complex Systems (Joint SSSC, TDS, COSY 2025), Gif-sur-Yvette, France, June-July 2025. | | 182. | Degradation-conscious model predictive control for marine solid-oxide fuel cells. A. Caspani, R.R. Negenborn, V. Reppa. Accepted for the 23rd European Control Conference (ECC'25), Thessaloniki, Greece, June 2025. | | | 181. | Generating reconfigurable manufacturing
alternatives from legacy factories. R. Leite Patrao, R.R. Negenborn, A. Napoleone. Accepted for the 11th IFAC Conference on Manufacturing Modelling, Management and Control (IFAC MIM'25), Trondheim, Norway, June-July 2025. | | 180. | Energy-efficient speed planning considering delay and dynamic waterway conditions for inland vessels. S. Slager, Y. Pang, R.R. Negenborn. Accepted for the International Ship Control Systems Symposium 2024 (ISCSS 2024), Liverpool, United Kingdom, November 2024. | | | 179. | Influence of ship-to-ship interaction on formation control of
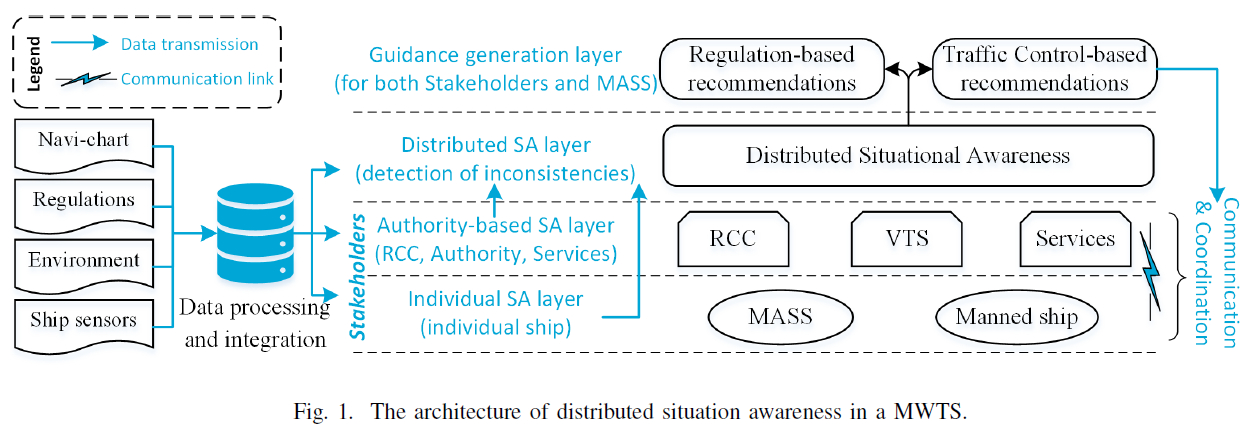
multi-vessel systems. X. Xiong, R.R. Negenborn, Y. Pang. Accepted for the 21st International Conference on Informatics in Control, Automation and Robotics (ICINO 2024), Porto, Portugal, November 2024. | | 178. | Model predictive control framework for optimizing offshore wind O&M. M. Borsotti, R.R. Negenborn, X. Jiang. Accepted for the 7th International Conference on Maritime Technology and Engineering (MARTECH 2024), Lisbon, Portugal, May 2024. | | | 177. | Parallel distributed collision avoidance with intention consensus based on ADMM. H. Anh Tran, T.A. Johansen, R.R. Negenborn. Accepted for the 17th IFAC Symposium on Control in Transportation Systems (IFAC CTS 2024), Agia Napa, Cyprus, July 2024. | | 176. | Manoeuvring modelling and control design of autonomous vessels on inland waterways. C. Zhang, A. Dhyani, J.W. Ringsberg, F. Thies, V. Reppa, R.R. Negenborn. Accepted for the 43rd International Conference on Ocean, Offshore and Arctic Engineering (OMAE 2024), Singapore, June 2024. | | | 175. | A multiple sensor fault diagnosis scheme for autonomous surface vessels. A. Dhyani, R.R. Negenborn, V. Reppa. In IFAC PapersOnLine 58(4) (IFAC SAFEPROCESS 2024), Ferrara, Italy, pp. 31-36, June 2024. | | 174. | A short review of NH3-fuelled Compression Ignition Engines for a SOFC-ICE power plant for shipping. I. Jacobs, P. de Vos, X.L.J. Seykens, R.R. Negenborn. Accepted for the Transport Research Arena 2024 (TRA'24), Dublin, Ireland, April 2024. | | | 173. | Trickle-down strategies: Integrating simulations with control loops of autonomous vessels on lab scale. F. Baart, M. van Gijn, B. Boogmans, M. Zagonjoli, R. Zuidwijk, R.R. Negenborn, M. van Koningsveld. In Journal of Physics: Conference Series 2618 (ICMASS'23), Rotterdam, The Netherlands, November 2023. Open access. | | 172. | Collision avoidance of autonomous ships in inland waterways – A survey and open research problems. H. Anh Tran, T.A. Johansen, R.R. Negenborn. In Journal of Physics: Conference Series 2618 (ICMASS'23), Rotterdam, The Netherlands, November 2023. Open access. | | | 171. | Paving the way towards zero-emission and robust inland shipping. A. Kirichek, J.F.J. Pruyn, B. Atasoy, R.R. Negenborn, R. Zuidwijk, R. van Duin, K. Tachi, M. van Koningsveld. In Proceedings of the 4th International Conference on Modelling and Optimisation of Ship Energy Systems (MOSES'23), Delft, The Netherlands, October 2023. Open access. | | 170. | Distributed situational awareness for maritime autonomous surface ships in mixed waterborne transport: An ontology-based framework. R. Song, E. Papadimitriou, R.R. Negenborn, P.H.A.J.M. van Gelder. Accepted for the 7th International Conference on Transportation Information and Safety (ICTIS'23), Xi'an, China, August 2023. | | | 169. | A collision avoidance algorithm with intention prediction for inland waterways ships. H. Ahn Tran, T.A. Johansen, R.R. Negenborn. Accepted for the 22nd IFAC World Congress (IFAC WC'23), Yokohama, Japan, July 2023. |
|
|
|
Chapters in books (latest) |
| |
| 16. | V. Garofano, Y. Pang, R.R. Negenborn. Toward a structured framework for control performance and safety assessment for a Maritime Autonomous Surface Ship. In Maritime Autonomous Vehicles: Methods and Measurements (F. Ehlers, eds.), IET / SciTech Publishing, 2025. 26 pp. | | | 15. | R.R. Negenborn, D.L. Schott, F. Corman. Port equipment and technology. In Encyclopedia of Marine & Offshore Engineering (J. Carlton, P. Jukes, Y.S. Choo, eds.), Wiley, 2017. 9 pp. | | 14. | F. Corman, R.R. Negenborn. Accessibility of ports and networks. In Ports and Networks - Strategies, Operations and Perspectives (H. Geerlings, B.S. Kuipers, R.A. Zuidwijk, eds.), Edward Elgar Publishers, pp. 127-145, 2018. | | | 13. | R.R. Negenborn, C. Ocampo-Martinez. Perspectives on transport of water versus transport over water. In Transport of Water versus Transport over Water (C. Ocampo-Martinez, R.R. Negenborn, eds.), Springer, pp. 1-10, 2015. | | 12. | X. Tian, R.R. Negenborn, P.J. van Overloop, J.M. Maestre, E. Mostert. Model predictive control for incorporating transport of water and transport over water in the dry season. In Transport of Water versus Transport over Water (C. Ocampo-Martinez, R.R. Negenborn, eds.), Springer, pp. 191-210, 2015. | | | 11. | V. Puig, C. Ocampo-Martinez, R.R. Negenborn. Model predictive control for combined water supply and navigability/sustainability in river systems. In Transport of Water versus Transport over Water (C. Ocampo-Martinez, R.R. Negenborn, eds.), Springer, pp. 13-33, 2015. | | 10. | A.H. Thomsen, C.M. Weimer, R.R. Negenborn. Catullus: Poeta flagrans an doctus?. In Baetica Renascens (J.M. Maestre, J.G.M. Calas, et al., eds.), pp. 621-650, 2014. | | 9. | R.R. Negenborn, J.M. Maestre. On 35 Approaches for Distributed MPC Made
Easy. In Distributed Model Predictive Control Made Easy (J.M. Maestre, R.R. Negenborn, eds.), Springer, Dordrecht, The Netherlands, pp. 1-37, 2014. | | 8. | J.L. Nabais, R.R. Negenborn, R.B. Carmona-Benitez, L.F. Mendonca, M.A. Botto. Hierarchical MPC for multiple commodity transportation networks. In Distributed Model Predictive Control Made Easy (J.M. Maestre, R.R. Negenborn, eds.), Springer, Dordrecht, The Netherlands, pp. 535-552, 2014. | | 7. | R.R. Negenborn. Decompositions of augmented Lagrange formulations for serial and parallel distributed MPC. In Distributed Model Predictive Control Made Easy (J.M. Maestre, R.R. Negenborn, eds.), Springer, Dordrecht, The Netherlands, pp. 437-450, 2014. | | 6. | S. Roshany-Yamchi, R.R. Negenborn, A.A. Cornelio. Nash-based distributed MPC for multi-rate systems. In Distributed Model Predictive Control Made Easy (J.M. Maestre, R.R. Negenborn, eds.), Springer, Dordrecht, The Netherlands, pp. 341-353, 2014. | | 5. | R.R. Negenborn, H. Hellendoorn. Intelligence in Transportation Infrastructures via Model-Based Predictive Control. In Intelligent Infrastructures (R.R. Negenborn, Z. Lukszo, H. Hellendoorn, eds.), Springer, Dordrecht, The Netherlands, pp. 3-24, 2010. | | 4. | P.J. van Overloop, R.R. Negenborn, B. De Schutter, N.C. van de Giesen. Predictive Control for National Water Flow Optimization in The Netherlands. In Intelligent Infrastructures (R.R. Negenborn, Z. Lukszo, H. Hellendoorn, eds.), Springer, Dordrecht, The Netherlands, pp. 439-461, 2010. | | 3. | R.R. Negenborn, G. Hug-Glanzmann, B. De Schutter, G. Andersson. A Novel Coordination Strategy for Multi-Agent Control using Overlapping Subnetworks with Application to Power Systems. In Efficient Modeling and Control of Large-Scale Systems (J. Mohammadpour, K.M. Grigoriadis, eds.), Springer, Norwell, Massachusetts, pp. 251-278, 2010. | | 2. | M. Arnold, R.R. Negenborn, G. Andersson, B. De Schutter. Distributed Predictive Control for Energy Hub Coordination in Coupled Electricity and Gas Networks. In Intelligent Infrastructures (R.R. Negenborn, Z. Lukszo, H. Hellendoorn, eds.), Springer, Dordrecht, The Netherlands, pp. 235-273, 2010. | | 1. | S. Leirens, R.R. Negenborn. Prevention of Emergency Voltage Collapses in Electric Power Networks using Hybrid Predictive Control. In Intelligent Infrastructures (R.R. Negenborn, Z. Lukszo, H. Hellendoorn, eds.), Springer, Dordrecht, The Netherlands, pp. 55-88, 2010. |
|
|
|
PhD Thesis |
| |
|
|
|
Special Issues of Journals |
| |
| 4. |
R.R. Negenborn, F. Corman.
Editorial: Computational logistics at work: Coordination and control in
transport logistics.
Transportation Research Part E, vol. 105, pp. 149-151, 2017. |
| 3. |
R.R. Negenborn, R.G. Hekkenberg, K. Visser.
Editorial: Autonomous Shipping in Focus.
SWZ Maritime, Special Issue Autonomous Ships, vol. 2. 1p, 2017. |
| 2. |
R.R. Negenborn, K. Visser.
Editorial: What is driving fundamental research in marine engineering?
SWZ Maritime, Special Issue Propulsion Systems, 2015, vol. 10. 2pp. |
| 1. |
P.J. van Overloop, R.R. Negenborn, D. Schwanenberg.
Introduction to the special issue on Water Prediction and Control Technology.
Journal of Hydroinformatics, vol. 15, no. 2, pp. 229-231, 2013. |
|
|
|
Technical & Project reports |
| |
| 13. |
NL AI Coalition -- Working Group Ports & Maritime, "Heading for AI -- Maritime Goals for Artificial Intelligen", 24 pp., 2022. |
| 13b. |
NL AI Coalition -- Working Group Ports & Maritime, "Koersen op AI -- Maritieme ambities op het gebied van AI in Nederland", 24 pp., 2021. |
| 13. |
R.R. Negenborn, D. van Heusden-van Winden, F. Schulte, E. van Hassel, A. Mohamoud, B. Friedhoff, E. van der Linden, "NOVIMOVE Periodic Report No. 1", Covering the period from 01-06-2020 to 30-11-2021 of European H2020 project
NOVIMOVE, 68 pp., January 2022. |
| 13. |
J. Wieczerzynska-van Baarle, Y. Pang, S. van Kesteren, R.R. Negenborn, "QA and IPR Procedures," Deliverable D6.3 on quality assurance and intellectual property right procedures, European H2020 project
NOVIMOVE, 18 pp., November 2020. |
| 12. |
J. Wieczerzynska-van Baarle, R.R. Negenborn, "Project Management Tool," Deliverable D6.1 on the adopted project management tools, European H2020 project
NOVIMOVE, 10 pp., November 2020. |
| 11. |
S. Xie, V. Garofano, X. Chu, R.R. Negenborn.
Ship collision avoidance based on deep deterministic policy gradients and beetle antenna search algorithm.
Technical
Report: DOI:10.13140/RG.2.2.20884.63366. Delft University of Technology, May 2020. |
| 10. |
J. Wieczerzynska-van Baarle, R.R. Negenborn, "Data Management Plan," Deliverable D6.4 on project data management, European H2020 project
NOVIMOVE, 8 pp., November 2020. |
| 9. |
R.R. Negenborn, "POPD - Requirement No. 2," Deliverable D7.2 on protection of personal data, European H2020 project
NOVIMOVE, 7 pp., August 2020. |
| 8. |
R.R. Negenborn, "H - Requirement No. 1," Deliverable D7.1 on ethics requirements when humans are involved, European H2020 project
NOVIMOVE, 8 pp., August 2020. |
| 7. |
S. Xie, V. Garofano, L. Chenguang, X. Chu, R.R. Negenborn.
Ship motion modeling using an optimized extended state observer-least squares support vector machine.
Technical
Report: DOI:10.13140/RG.2.2.17529.19048. Delft University of Technology, November 2019. |
| 6. |
T. van Dijk, H. van Dorsser, R. van den Berg, H. Moonen, R.R. Negenborn, Smart ships and the changing maritime ecosystem, SmartPort White Paper, 30 pp., September 2018.
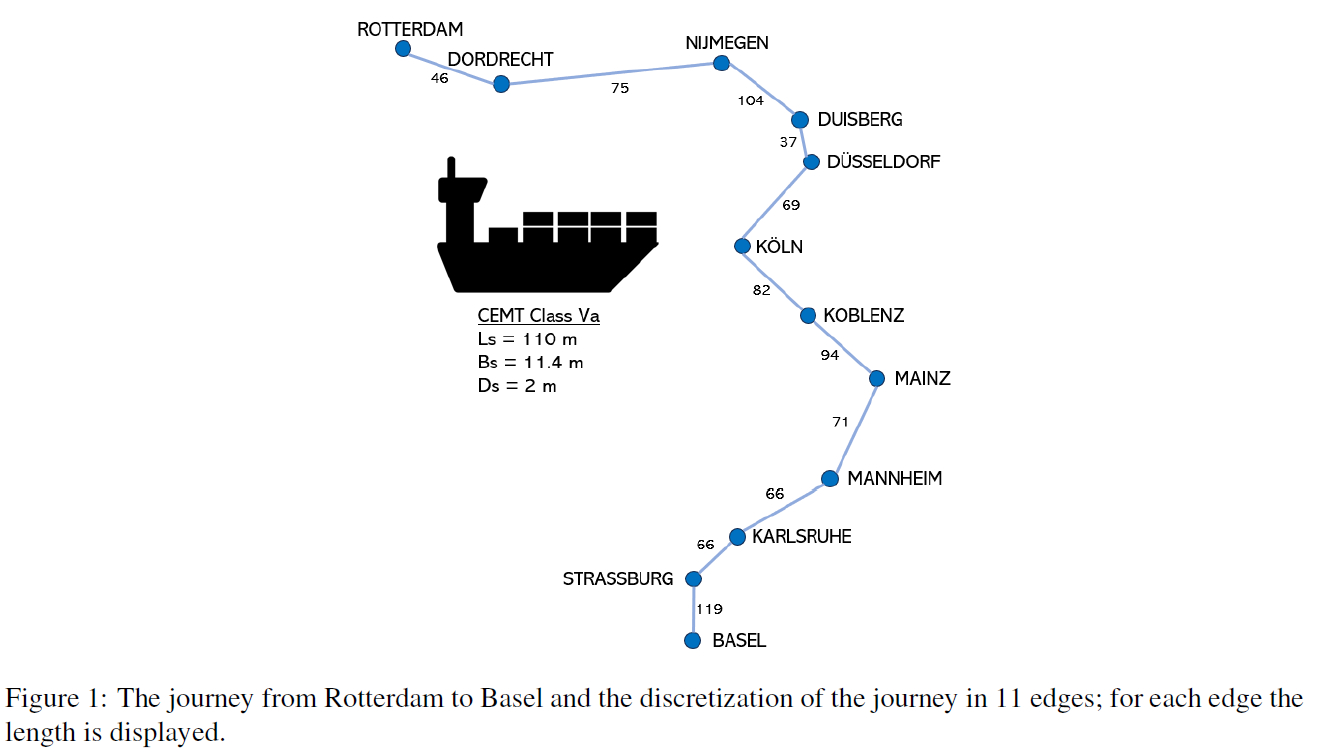
|
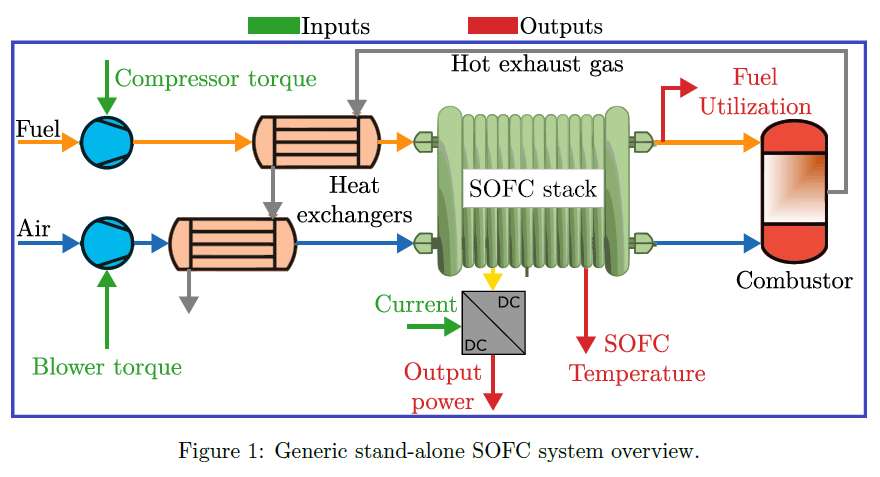
| 5. |
R.R. Negenborn, M.B. Duinkerken, L. Chen, A. Devaraju, M. Streng, B. Kuipers, J. Harmsen, H. van Dorsser, C. van Wijk, R. van den Berg, "Autonomous Ships in the Port of Rotterdam -- Exploration of Perspectives and Potential", Report of SmartPort project TET-SP, 49 pp., January 2018. |
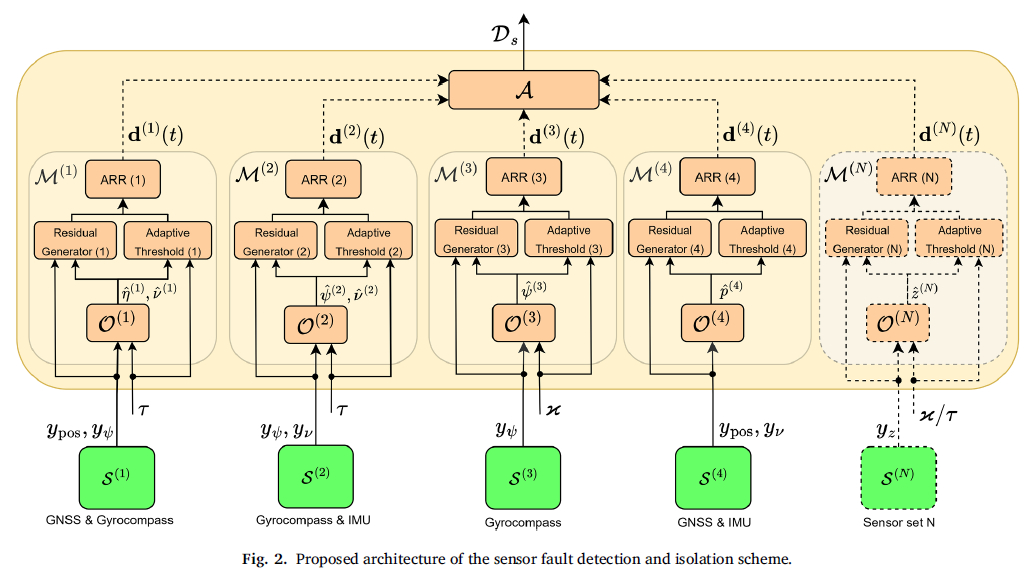
| 4. |
A. Kozma, C. Savorgnan, R.R. Negenborn, and B. De Schutter,
"Report on or proceedings of a special session at an
international conference," Deliverable D8.2.1, European FP7
STREP project HD-MPC, 16 pp., February 2010. |
| 3. |
H. Scheu, J.C. Calderon, D. Doan, J.F. Garcia, R.R. Negenborn, A.
Tarau,
F.V. Arroyave, B. De Schutter, J.J. Espinosa, and W. Marquardt, "Report
on assessment of existing coordination mechanisms for simple case
studies, and on possible options for improving and extending these
coordination mechanisms," Deliverable D3.3.1, European FP7 STREP project
HD-MPC, 30 pp., December 2009. |
| 2. |
B. De Schutter, R.R. Negenborn, M. Diehl, K. Gevaert, and C.
Savorgnan, "Report on the set-up of a website including downloads of
reports, presentations, open-source software and a database of benchmark
problems," Deliverable D8.1.1, European FP7 STREP project HD-MPC,
11 pp., March 2009. |
| 1. |
R.R. Negenborn, B. De Schutter, H. Hellendoorn.
Multi-agent model predictive control: A Survey.
Technical
Report: 04-010. Delft Center for Systems and Control, TU Delft,
Delft, The Netherlands, December 2004.
Abstract. |
|
|
|
Msc Thesis |
| |
|
|
|
Media recognition |
| |
| 57. |
Hoe ziet de scheepvaart van de toekomst eruit? Kijkje in de keuken van maritiem onderzoekers, T. Heerschop, Schuttervaer, January 2025.
|
| 56. |
Rivers of commerce in the Rhine-Alpine corridor, interview, CORDIS EU Results in Brief, November 2024.
|
| 55. |
Scheepvaart zonder schipper gaat mogen, interview, RTL Z TV Nieuws, October 22, 2024.
|
| 54. |
Zonder schipper naar de Wadden: experiment met onbemand varen, M. Witlox, RTL Z, October 22, 2024.
|
| 53. |
Is de kaptein op de veerdienst naar Vlieland straks niet meer nodig?, A. Gras, Het Financieele Dagblad, September 9, 2024.
|
| 52. |
Robot ships: Huge remote controlled vessels are setting sail, J. Amos, R. Morelle, A. Francis, BBC News, March 8, 2024.
|
| 51. |
Self-navigating ships could change the shipping industry. Here are the companies poised to benefit, H. Kim, CNBC, February 2, 2024.
|
| 51. |
"In 2030 zit de kapitein misschien aan wal in plaats van op zijn schip", D. Dewever, Trends Top, January 2024.
|
| 50. |
Autonoom Varen, interview, Traffic Radio Live!, March 15, 2023.
|
| 50. |
Ja, generatieve AI zal taken van kenniswerkers gaan overnemen, en nee, dat is niet erg, J. Stolze, Het Financieele Dagblad, December 8, 2023.
|
| 50. |
The port of the future: smart, clean and autonomous, B. Mols, Pioneering Tech, April 2023.
|
| 49. |
Les technologies autonomes facilitent aussi la tache des navigateurs, J. Michel, Marine & Oceans, January 2023.
|
| 49. |
Kansrijke brandstof met grote beperkingen, G. Vreeman, Grondig, September 2022.
|
| 48. |
"Megatransitie", NWO Resultaat Magazine, pp. 19-21, 2022.
|
| 48. |
"Vooral individuele schepen worden slimmer gemaakt", V. Krabbendam, Schuttevaer, November 2022.
|
| 48. |
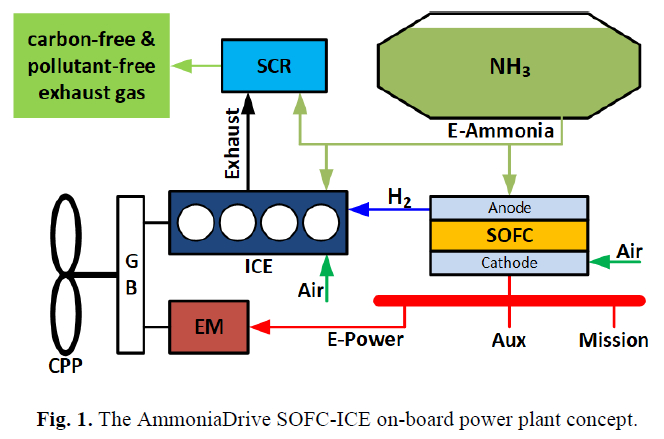
The AmmoniaDrive project explained -- Ammonia as a marine fuel 'done right', P. de Vos, L.M.T. Somers, T. Tinga, E.M. Foekema, B. van der Zwaan, R.R. Negenborn, SWZ Maritime, June/July 2022.
|
| 47. |
Op de miljoenensnelweg in de Rotterdamse haven is het doodstil, Algemeen Dagblad (AD), David Bremmer, August 8, 2022.
|
| 46. |
NWO grant for TU Delft project using ammonia as fuel for ships, SWZ Maritime, Mariska Buitendijk, June 7, 2022.
|
| 45. |
Onderzoek naar schoon varen op ammoniak, NWO Wetenschap, May 30, 2022.
|
| 44. |
"NWO Perspectief Award for Project using Ammonia as Fuel for Heavy Transport", TU Delft News, May 30, 2022.
|
| 43. |
"Deze Nieuwegeinse haven wil een belangrijke rol gaan spelen in (groen) vervoer over water in de regio", RTV Utrecht, M. van Ooijen, September 8, 2021.
|
| 42. |
"World's first crewless, zero emissions cargo ship will set sail in Norway", CNN World Edition, interview by R. Beighton, August 25, 2021.
|
| 41. |
"Autonomous Shipping-- The perspective of Maritime Business Service Providers", Rotterdam Maritime Capital, October 2021.
|
| 40. |
"Autonomous Shipping-- Maritime technology in Rotterdam", Rotterdam Maritime Capital, interview, September, 2021.
|
| 40. |
"Nieuwe ideeen voor binnenvaart", Delft Integraal, J. Wassink, July 2021.
|
| 39. |
Vooruitkijken voor slimme logistiek, Home of Innovation, June 2021.
|
| 38. |
"Klaar voor de toekomst met smart shipping", Netherlands Forum Smart Shipping (SMASH), 2020.
|
| 37. |
"Dynamic Fleet Management - Improving the concept of mobility", R.R. Negenborn, F. Schulte, in The Future of Moving Forward, iCAVE, pp. 51-60, 2021.
|
| 36. |
"Robot Boats Leave Autonomous Cars in Their Wake", The Wall Street Journal, August 31, 2020.
|
| 35. |
"Onderzoeksprogramma NOVIMOVE combineert technische en logistieke innovaties", Binnenvaart Krant, June 4, 2020.
|
| 34. |
"Hoe kun je de binnenvaart verbeteren?", Delta, Jos Wassink, June 18, 2020.
|
| 33. |
"Een crisis zet dingen in beweging", Professorenstuk in De Slurf, TUDelft, 2020.
|
| 32. |
"Zelfvarend schip is de oplossing voor het personeelstekort in de binnenvaart", EenVandaag, Lyanne Ederveen, January 20, 2020.
|
| 31. |
"Laat schepen met elkaar praten", De Ingenieur, no. 7, Jim Heirbaut, July 2019.
|
| 30. |
"Waterborne platooning by smart vessels for smart shipping",
A. Haseltalab, L. Chen, A. Colling, L. Borst, V. Garofano, R. Hekkenberg, R.R. Negenborn,
The Naval Architect -- Special Issue Smart Ships, pp. 55-62, May 2019.
|
| 29. |
"Nieuwe Franse Watertaxi & autonomous ships at TU Delft", RTL Nieuws 19:30, May 31, 2018.
|
| 28. |
"Prof. Rudy Negenborn tells you more about Autonomous Vessels", TU Delft, June 2018.
|
| 27. |
"Varen er straks alleen nog onbemande containerschepen rond?", TROUW, June 2017.
|
| 26. |
"Nieuw researchlab voor zelfrijdende auto's in Delft geopend", TV Omroep West, June 2017.
|
| 25. |
"Autonomous Ships at TUDelft", BBC Arabic 4Tech Television, April 2017.
|
| 24. |
"De beste stuurlui zitten aan wal", EOS Magazine, Teake Zuidema, pp. 56-59, April 2017.
|
| 23. |
"Alle Hens van Dek - De opkomst van de autonome scheepvaart", De Ingenieur, no. 3, Jim Heirbaut, pp. 12-19, March 2017.
|
| 22. |
Special issue on Autonomous Ships, SWZ Magazine, February 2017.
|
| 21. |
"Het Brein van de TU", Delta, Tomas van Dijk, March 6, 2017.
|
| 20. |
"Het robotschip komt eraan", Algemeen Dagblad (AD), David Bremmer, December 23, 2016.
|
| 19. |
"Autonomous shipping as a possible solution to impending labour shortages in the shipping sector", Phys.org, December 2016.
|
| 18. |
"Met autonoom varen blijven alle stuurlui aan wal", NPO Radio 1 "Nieuws en Co", Marc-Robin Visscher, December 2016.
|
| 17. |
"Zelfvarend containerschip verwacht in 2030", BNR Nieuws radio, Kay Rutten, December 2016.
|
| 16. |
"Developing the Roboat", Delta, Jos Wassink, December 2016.
|
| 15. |
"Coming soon to a canal near you?", Delta, Brandon Hartley, October 2016.
|
| 14. |
"Robotbootjes / Dit gebeurt komend jaar in Delft", Delta, Tomas van Dijk, September 2016 / Delft Integraal, October 2016
|
| 13. |
"Over vijf tot zeven jaar proefprojecten met autonoom varen", Maritiem Nederland, Bart Stam, December 2015.
|
| 12. |
Special issue on Propulsion Systems, SWZ Magazine, October 2015.
|
| 11. |
Contribution to national news paper TROUW article on robotization of the Port of Rotterdam ("Robot rukt op in de Rotterdamse haven"), Niels Markus, November 10, 2015.
|
| 10. |
Public awarded "Public prize for best poster" to B. van Riessen, R.R. Negenborn,
R. Dekker, at yearly port research event 2014.
|
| 9. |
Port of Rotterdam awarded "Best academic poster" prize to H. Zheng, R.R.
Negenborn, G. Lodewijks, at yearly port research event, 2014.
|
| 8. |
Interview with R.R. Negenborn on supervision of PhD candidates for the documentary "We are not Paper Production Machines", and the accompagnying online magazine, Downsideup, 2015.
|
| 7. |
Algemeen Dagblad Dutch national newspaper reported on the solutions for
problems in the Spoorzone (railway zone) in the center of Delft, 2014.
|
| 6. |
15 online media reported outcomes of project on refrigerated transportation
(in cooperation with NOMAD Power), 2014. |
| 5. |
Interview with R.R. Negenborn, K. Visser, and R. Geertsma on hybrid ship
systems for Delft Integraal, 2015.
|
| 4. |
Interview with R.R. Negenborn by Porto and Marine, Brazil, on challenges in the
Port of Rotterdam, 2014.
|
| 3. |
Elmar Veerman. Containerbegrip -- 'Transport kan veel slimmer',
Nederland van Boven -- Wetenschap 24/VPRO Noorderlicht Artikelen
(December 12, 2011). Interview
with
Rudy Negenborn.
|
| 2. |
Connie van Uffelen. Knappe koppen / Efficienter bezorgen, Delta (November
2010). Interview with
Rudy Negenborn.
|
| 1. |
Tomas van Dijk. Verkeersregelaar, Delta
(February 2006). Interview with Rudy Negenborn.
|
|
|
|