|
|
|
| Main research interests: Coordination within and among transport hubs
4S Framework:
Real-time coordination of
Smart Equipment in Smart Hubs
for Smart Ports in Smart Networks
|
Anticipating the
Massive introduction of
Sensing, Computation, and
Communication Technologies
|
| |
|
|
Spotlight publication
| | A dynamic shipment matching problem in hinterland synchromodal transportation |
| 
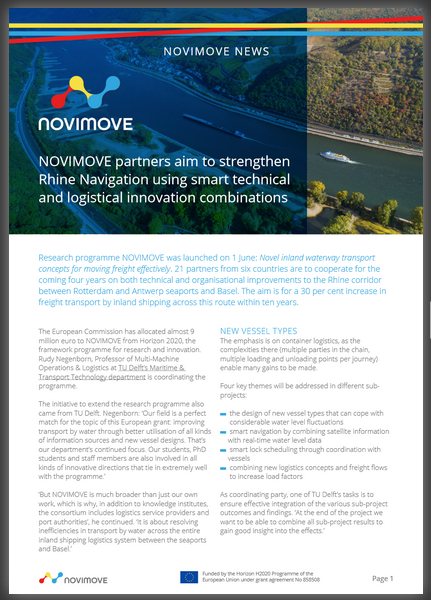
| | "Hinterland intermodal transportation is the movement of containers between deep-sea ports and inland terminals by using trucks, trains, barges, or any combination of them. Synchromodal transportation, as an extension of intermodal transportation, refers to transport systems with dynamic updating of plans by incorporating real-time information. The trend towards spot markets and digitalization in h..." [More...] |
| A dynamic shipment matching problem in hinterland synchromodal transportation. W. Guo, B. Atasoy, W.W.A. Beelaerts van Blokland, R.R. Negenborn. Decision Support Systems, vol. 134, no. 113289, July 2020.  
|
|
|
|
Prospective students Multi-Machine Engineering (MME):
Interested in becoming a multi-machine Master of Science at TU Delft?
Find out more here about our 2-year MSc program.
|
|
|
Inauguration Speech
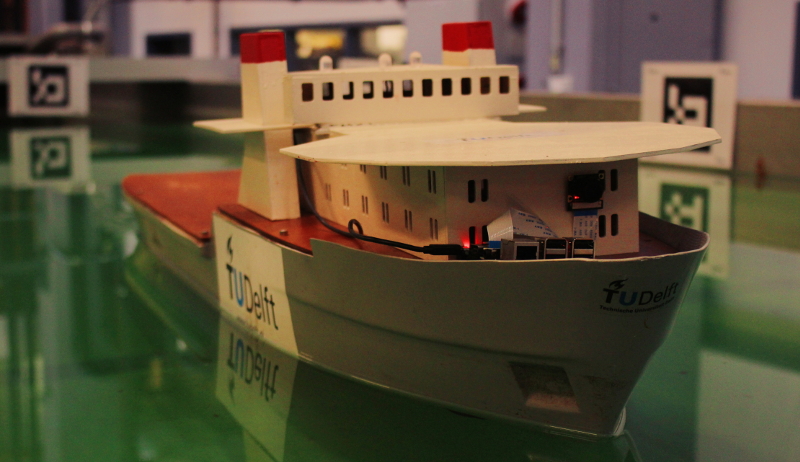
on communication, logistics, autonomous ships, and multi-machine engineering

"What if ships could talk?", or: Coordination for Real-Time Logistics
[Watch the public presentation online]
|
|
| |
|
| Infographics
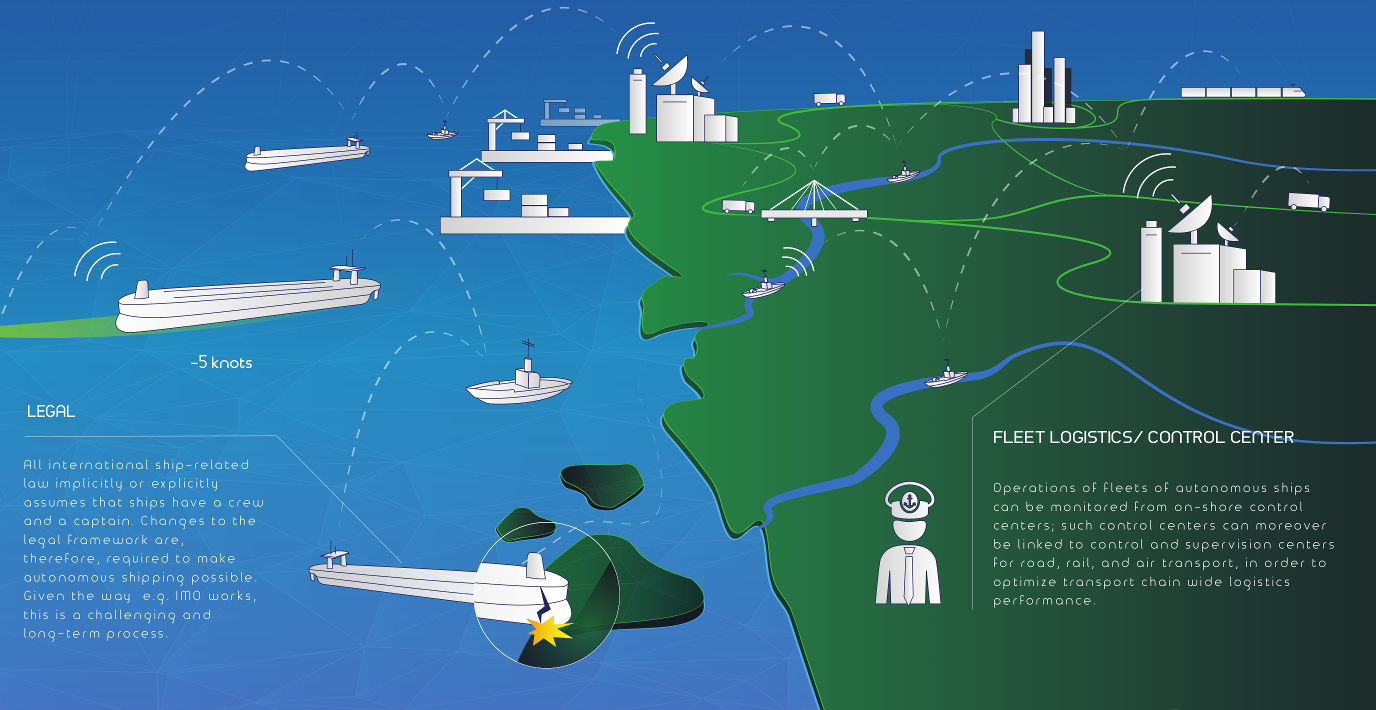
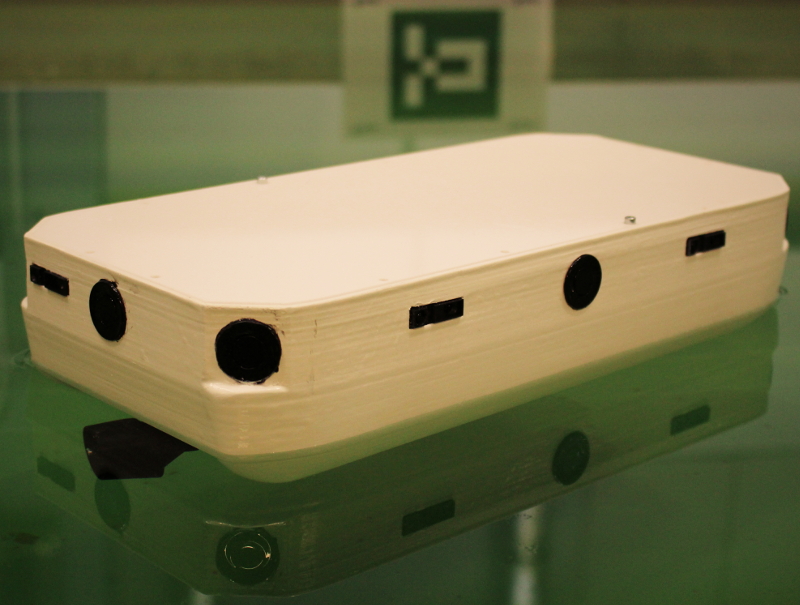
How will autonomous ships work?
|
| Books
|
|
Research in Sketches

[More...]
|
|
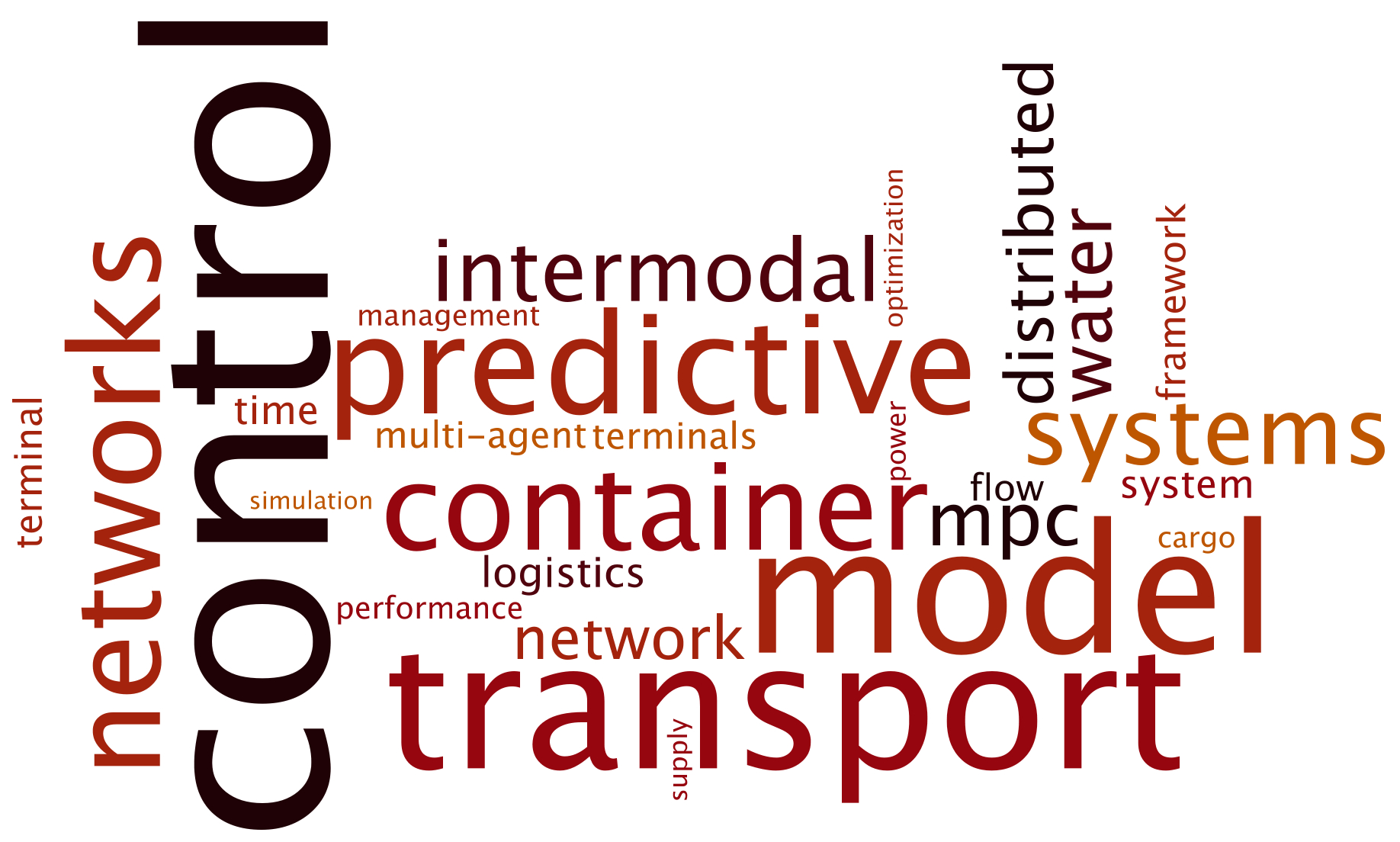
Active topic cloud (past 3 years)
| |
Keywords
logistics,
intermodal transport,
container transport
transport over water,
control of ships
transportation networks, inter-terminal transport
water
networks
power networks,
gas networks
multi-agent
systems, model
predictive
control, hybrid
systems
reinforcement learning, Kalman filters, learning robots
The Brain of TU Delft
|
|

|
|
| |
|
|
|
|