|
| Title: | Robust vessel maneuvering modelling using set-membership identification | | | Authors: | A. Dhyani, A. Tsolakis, K. van der El, R.R. Negenborn, V. Reppa |
| | Journal: | Control Engineering Practice | | |
| | Abstract: | System identification of full-scale surface vessels must address significant uncertainties arising from
model mismatch, sensor noise, and environmental disturbances. The identified models are utilised
for designing the guidance and control systems for autonomous navigation and simulation. To
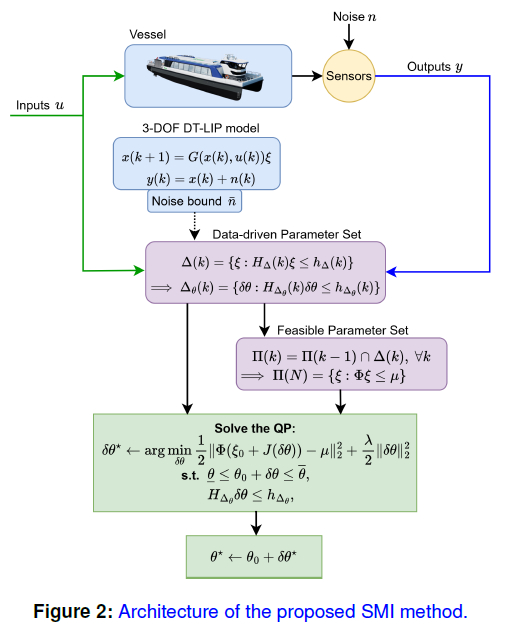
provide safety, robustness, and constraint satisfaction guarantees, it is essential to quantify the bounds of parametric model uncertainty. This paper proposes a set-membership identification method for estimating key parameters of a nonlinear vessel maneuvering model, including inertia and added-mass terms, other hydrodynamic derivatives in the Coriolis-centripetal, damping matrices, and actuation-related parameters. The method provides a bounded-error characterisation of uncertainties, offering a reliable framework for modelling the effects of measurement noise, wind, and waves. It involves computing a data-driven parameter set (DDPS) using input-output measurements and model assumptions, which is further used to compute a feasible parameter set (FPS). The parameter estimates are then obtained by iteratively solving a quadratic program over the FPS polytope. Validation using experimental data from a full-scale catamaran ferry demonstrates improved accuracy of up to 26.5% as compared to existing approaches, faster computational times of up to one order of magnitude per sample, and the capability to provide bounded parameter estimates. |
| | Reference: | Robust vessel maneuvering modelling using set-membership identification. A. Dhyani, A. Tsolakis, K. van der El, R.R. Negenborn, V. Reppa. Control Engineering Practice, vol. 173, no. 106936, August 2026. Open access. | | | Download: | Open acccess |
|
|