|
| Title: | Multiple sensor fault diagnosis for safe navigation of autonomous surface vessels | | | Authors: | A. Dhyani, K. van der El, R.R. Negenborn, V. Reppa |
| | Journal: | Control Engineering Practice | | |
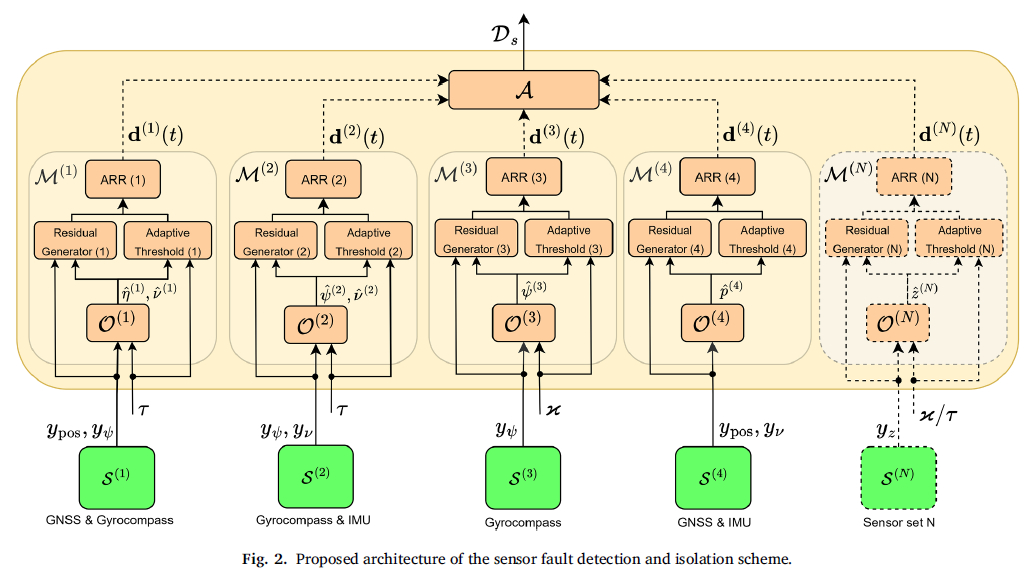
| | Abstract: | Over the past decade, autonomous surface vessels (ASVs) have increasingly operated in a range of challenging environments involving safety-critical scenarios. Their navigational capabilities rely on rich and reliable sensor data, enabling accurate localisation, situational awareness and environmental perception. This allows ASVs to perform motion planning, collision avoidance and navigational control tasks. To ensure maritime safety, faults affecting onboard navigational sensors must be diagnosed. This paper presents a model-based fault diagnosis scheme for ASVs affected by multiple sensor faults. Model-based methods utilise available sensors and dynamical models for residual generation. However, models describing the navigation may vary considerably for ASVs due to differences in vessel types, actuator configurations and sensor setups. To address this challenge, multiple residuals are synthesised using observer-based monitoring modules in the navigational sensors. Considering the impact of uncertainties, the residuals are designed to be bounded by adaptive thresholds proposed for each monitoring module. Fault isolation is then performed using a combinatorial decision logic, achieved by grouping the available sensors into multiple sensor sets and supported by model-based sensitivity analysis. Finally, the effectiveness of the proposed scheme is verified through simulation examples of two real-world vessels of different types with different sensor and actuator configurations, thereby illustrating its application. |
| | Reference: | Multiple sensor fault diagnosis for safe navigation of autonomous surface vessels. A. Dhyani, K. van der El, R.R. Negenborn, V. Reppa. Control Engineering Practice, vol. 168, no. 106673, March 2026. Open access. | | | Download: | Open access |
|
|