|
| Title: | Trickle-down strategies: Integrating simulations with control loops of autonomous vessels on lab scale | | | Authors: | F. Baart, M. van Gijn, B. Boogmans, M. Zagonjoli, R. Zuidwijk, R.R. Negenborn, M. van Koningsveld |
| | Conference: | International Conference on Maritime Autonomous Surface Ships 2023 (ICMASS'23) | | Address: | Rotterdam, The Netherlands | | Date: | November 2023 |
| | Abstract: | This study integrates strategic decisions and operational control systems in autonomous shipping. By providing ships with situational information and adding a virtual operator, we show that vessels can make informed choices regarding their route and engine settings. To demonstrate this integration, we developed new components and put these to the test in three lab experiments.
The green routing capability experiment showed the bridge between the control system of the autonomous vessel, operated via Robot Operating System (ROS), to the simulation environment of OpenCLSim. We developed a real-time variant of OpenCLSim and a communication component that could expose the state of the OpenCLSim simulation with the ROS system. This experiment showed that an autonomous vessel could follow a path provided by the simulation.
The green steaming capability experiment showed that the ship could also adapt its speed based on information from the simulations. We developed an additional communication component capable of advising the vessel about its velocity. Together with the green-routing capability, this forms the basis for more complex experiments.
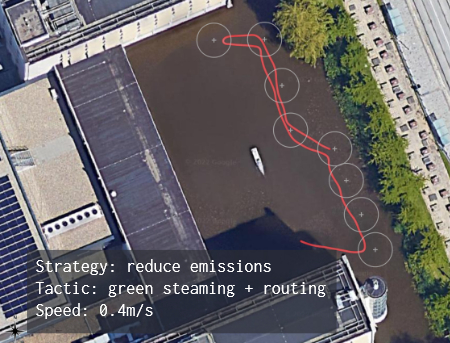
The port layout experiment showed a potential use case of the green-routing and green-steaming capabilities. We created a waypoint layout similar to the port. While a ship is sailing, twelve simulations are computed every five seconds. The scenarios vary in engine order, route choices, resulting in varying emissions, fuel, and cost. We evaluated the impact of different tactics such as green-routing, green-steaming, and full-speed sailing on operational behavior like steering and engine order. Our approach, using a real-time version of a Vessel in the OpenCLSim simulation software, enabled predictive simulations to facilitate the chosen tactic based on a given strategy. Integrating simulations to evaluate the options with the control systems can develop into a valuable tool for optimizing vessel performance and reducing environmental impact in autonomous shipping operations. |
| | Reference: | Trickle-down strategies: Integrating simulations with control loops of autonomous vessels on lab scale. F. Baart, M. van Gijn, B. Boogmans, M. Zagonjoli, R. Zuidwijk, R.R. Negenborn, M. van Koningsveld. In Journal of Physics: Conference Series 2618 (ICMASS'23), Rotterdam, The Netherlands, November 2023. Open access. | | | Download: | Open access |
|
|