|
| Title: | A robust optimization approach for platooning of automated ground vehicles
in port hinterland corridors | | | Authors: | N. Pourmohammad-Zia, F. Schulte, R.G. Gonzalez-Ramirez, S. Voß, R.R. Negenborn |
| | Journal: | Computers & Industrial Engineering | | |
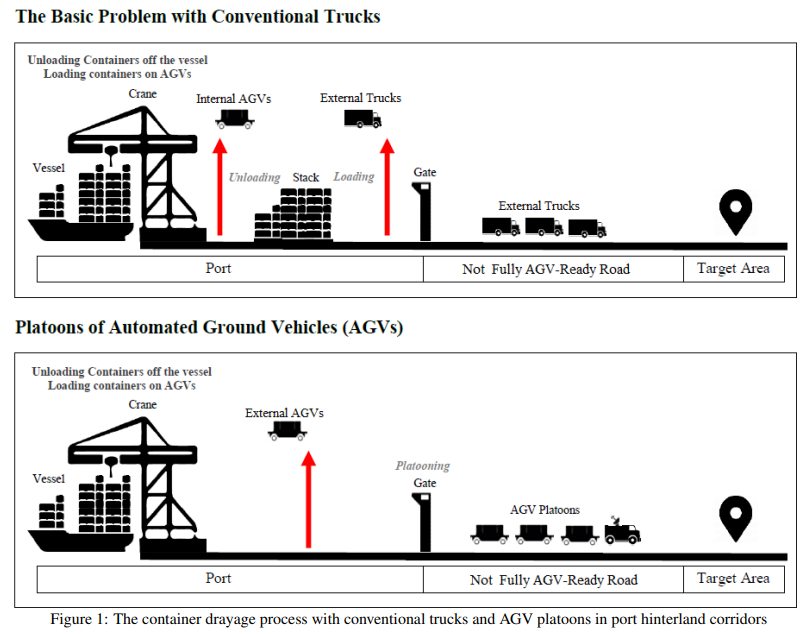
| | Abstract: | Modern ports face significant challenges as strategic nodes of global supply chains, being responsible for the coordination of inbound and outbound flows at deep-sea and in hinterland transport corridors. Digitization and the adoption of disruptive technologies can help ports to tide over operational challenges. Automated Ground Vehicles (AGVs) are an integral part of operations at many modern ports, especially inside container terminals. With the shift to automated transport outside of the terminal areas, these AGVs may form platoons to establish an efficient port hinterland transport corridors. In this work, we propose a new robust optimization approach to assess the time and cost-efficiency of applying such AGV platoons in a container pickup and delivery problem. We develop a bi-objective mixed-integer programming model, which simultaneously minimizes time and cost elements, and also considers emissions. Each transportation task can be carried out by AGVs or conventional trucks, while the number of available vehicles for each mode is uncertain (as they are used to connect different modalities of container transport). The robust optimization model is based on an ellipsoidal uncertainty set to handle this uncertainty and an augmented epsilon constraint method to obtain Pareto-optimal solutions for this multi-objective problem. The developed framework is evaluated in two case studies: the Port of Rotterdam in The Netherlands and the Port of Valparaiso in Chile, with different traveling distances in corridors to a dry port (200 km) and a pre-terminal (11 km), respectively. The results indicate that the new direct delivery scheme by AGV platoons is significantly more cost- and time-efficient than the benchmark and provides a low-carbon emission transportation mode. While the benefits of decreased dwell times (56% on average) and carbon emissions (on average by 10%) are similar for short and long traveling distances, the savings in cost increase (from 4.9% to 8%) with the increased distance in the Rotterdam case. |
| | Reference: | A robust optimization approach for platooning of automated ground vehicles
in port hinterland corridors. N. Pourmohammad-Zia, F. Schulte, R.G. Gonzalez-Ramirez, S. Voß, R.R. Negenborn. Computers & Industrial Engineering, vol. 177, no. 109046, March 2023. | | | Request: | A
copy of this publication. |
|
|