|
| Title: | Coordination and optimization control framework for vessels platooning in inland waterborne transportation system | | | Authors: | W. Tao, M. Zhu, S. Chen, X. Cheng, Y. Wen, W. Zhang, R.R. Negenborn, Y. Pang |
| | Journal: | IEEE Transactions on Intelligent Transportation Systems | | |
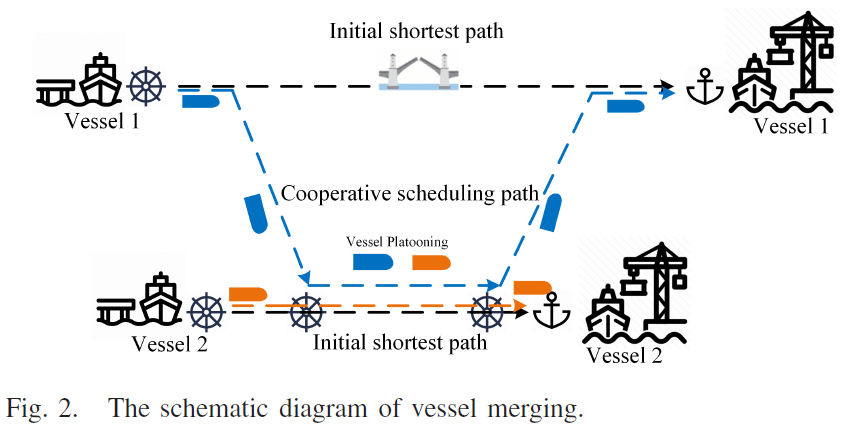
| | Abstract: | Vessels sailing in a single platoon could reduce resistance from the perspective of the whole platoon and the individual vessel, and contribute to improving energy benefits. Moreover, transportation energy costs and traffic efficiency are essential indicators for measuring waterborne transportation systems. We attempt to minimize transportation energy costs by coordinating platoon formation using a distributed framework of controllers. A large-scale coordinated vessel platooning program is proposed to minimize transportation energy costs and optimize traffic efficiency while guaranteeing safety. The control framework covers routing, energy consumption-dependent cooperative platooning decision and speed optimization based on graph search algorithm, cluster analysis, optimal control approach and model predictive control. Firstly, a local scheduling strategy combined with the leader vessel selection algorithm is adopted. Furthermore, we used cluster analysis to create a series of mergeable vessel platooning sets. Then, we used the mathematical planning method and a two-step hybrid optimal control approach to calculate the improvement and optimization of each vessel platoon’s path and speed. Finally, the scalability of the scheduling strategy is elucidated. In a simulation of large scale inland waterborne network, savings surpassed 3.5% when six hundreds vessels participated in the system. These simulation results reveal that the scheduling strategy coordinating vessels into vessel platooning, which improves transportation efficiency as well as descends cost, comparing to a fixed origin route in the waterway network. |
| | Reference: | Coordination and optimization control framework for vessels platooning in inland waterborne transportation system. W. Tao, M. Zhu, S. Chen, X. Cheng, Y. Wen, W. Zhang, R.R. Negenborn, Y. Pang. IEEE Transactions on Intelligent Transportation Systems, vol. 24, no. 12, pp. 15667-15686, December 2023. | | | Request: | A
copy of this publication. |
|
|