|
| Title: | Multi-vessel cooperative speed regulation for ship manipulation in towing scenario | | | Authors: | Z. Du, R.R. Negenborn, V. Reppa |
| | Conference: | 13th IFAC Conference on Control Applications in Marine Systems, Robotics, and Vehicles (IFAC CAMS'21) | | Address: | Oldenburg, Germany | | Date: | September 2021 |
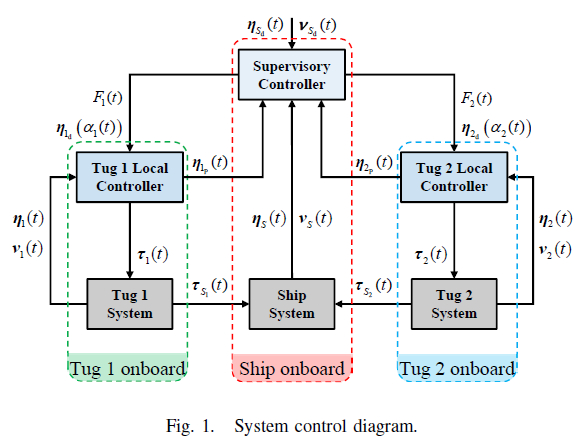
| | Abstract: | This paper proposes a multi-layer, distributed control scheme for physically interconnected multiple tugboats performing a towing process. The distributed control structure is built based on the so-called alternating direction method of multipliers strategy to reach consensus between controllers of the ship and the two tugs. In the higher layer, the supervisory controller outputs the desired towing forces and reference trajectory for the tugs. This information is used by the tug local controller in the lower layer to calculate the thruster forces and moment for manipulating the ship. The control strategy in the controllers is based on the model predictive control method, whose cost function is designed by position and velocity error to make the ship follow the waypoints and speed profile. Simulation experiments illustrate that the proposed method ensures the smoothness and efficiency of the towing process. |
| | Reference: | Multi-vessel cooperative speed regulation for ship manipulation in towing scenario. Z. Du, R.R. Negenborn, V. Reppa. In IFAC PapersOnLine 15(16) (IFAC CAMS'21), Oldenburg, Germany, pp. 384-389, September 2021. | | | Request: | A
copy of this publication. |
|
|