|
| Title: | Cooperative multi-agent control for autonomous ship towing under environmental disturbances | | | Authors: | Z. Du, R.R. Negenborn, V. Reppa |
| | Journal: | IEEE/CAA Journal of Automatica Sinica | | |
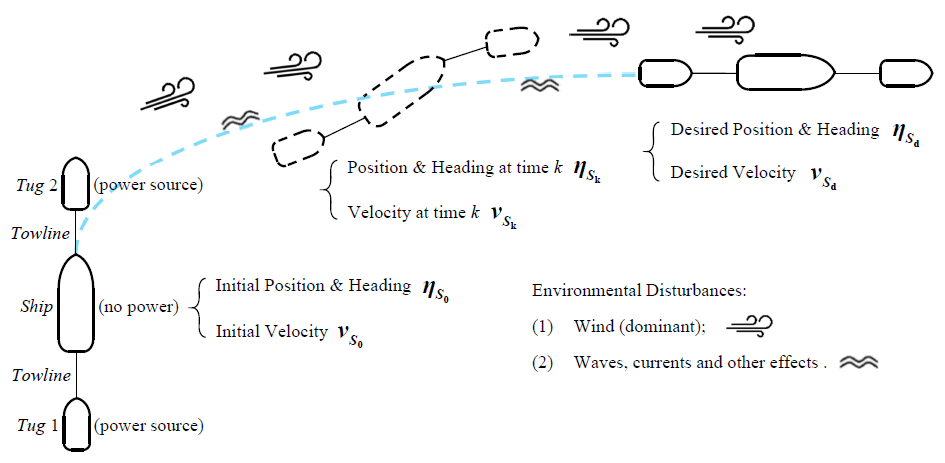
| | Abstract: | Among the promising application of autonomous surface vessels (ASVs) is the utilization of multiple autonomous tugs for manipulating a floating object such as an oil platform, a broken ship, or a ship in port areas. Considering the real conditions and operations of maritime practice, this paper proposes a multi-agent control algorithm to manipulate a ship to a desired position with a desired heading and velocity under the environmental disturbances. The control architecture consists of a supervisory controller in the higher layer and tug controllers in the lower layer. The supervisory controller allocates the towing forces and angles between the tugs and the ship by minimizing the error in the position and velocity of the ship. The weight coefficients in the cost function are designed to be adaptive to guarantee that the towing system functions well under environmental disturbances, and to enhance the efficiency of the towing system. The tug controller provides the forces to tow the ship and tracks the reference trajectory that is computed online based on the towing angles calculated by the supervisory controller. Simulation results show that the proposed algorithm can make the two autonomous tugs cooperatively tow a ship to a desired position with a desired heading and velocity under the (even harsh) environmental disturbances. |
| | Reference: | Cooperative multi-agent control for autonomous ship towing under environmental disturbances. Z. Du, R.R. Negenborn, V. Reppa. IEEE/CAA Journal of Automatica Sinica, vol. 8, no. 8, pp. 1365-1379, August 2021. | | | Request: | A
copy of this publication. |
|
|