|
| Title: | Follow-the-Leader control strategy for azimuth propulsion system on surface vessels | | | Authors: | B. Piaggio, V. Garofano, S. Donnarumma, A. Alessandri, R.R. Negenborn, M. Martelli |
| | Conference: | 2020 International Ship Control Systems Symposium (iSCSS 2020) | | Address: | Delft, The Netherlands | | Date: | October 2020 |
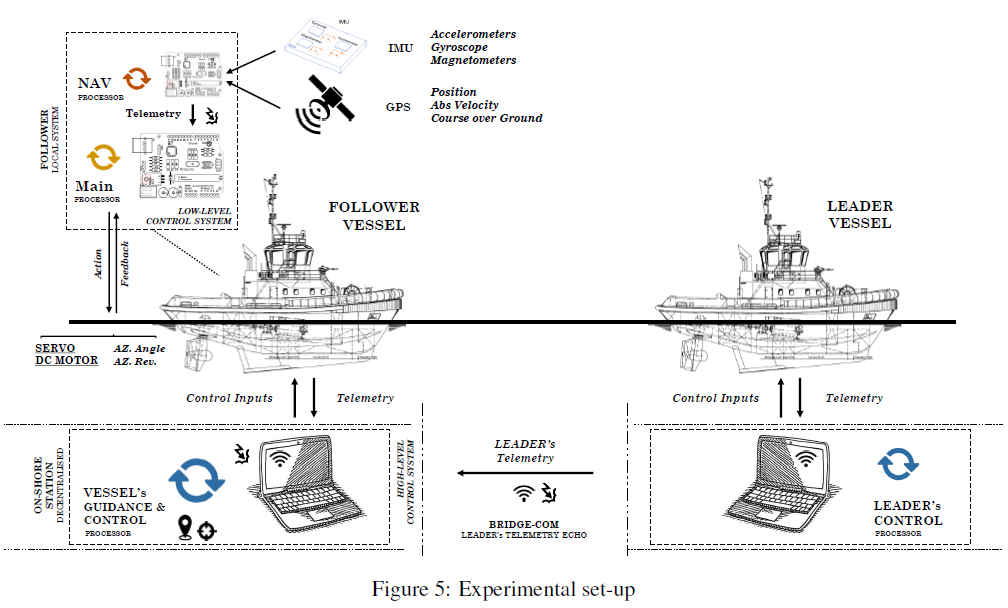
| | Abstract: | This paper presents an effective autonomous follow-the-leader strategy for Azimuthal Stern Drive vessels. The control logic has been investigated from a theoretical point of view. A line-of-sight algorithm is exploited to ensure yaw-check ability, while a speed-check feature is implemented to track the velocity of the target along the path. For this purpose, a linearised maneuverability model for azimuthal drive surface vessels is presented. A model-based control synthesis is proposed to ensure the stability of the closed-loop system and robust PID controllers are designed by using Linear Matrix Inequalities technique. The control strategy has been successively validated in two steps, initially by using simulation techniques, and then experimentally using an outdoor scenario with model scale tugs. The path planning, navigation, guidance and control modules are studied, detailed, and digitally implemented on-board of the model scale tugs. The models are supplied with GNSS+INS navigation system. Low-level management and control of Azimuthals angles and shaft revolutions is implemented on-board. High-level decentralised path planning, guidance, and control sequence evaluation are dealt with at a remote ground station. In particular, the presented follow-the-leader strategy meets the most generic needs of platooning convoys, and, in the specific instance, of Escort convoy tugs. The operative profile of the latter concerns long-lasting and routine chases with the continuous demand of tuning heading and speed to track the target vessels, until the rare occurrence of an emergency event. In a realistic scenario, the proposed control system would be beneficial for the tug master’s lucidity and alertness, while reducing avoidable risks. At the end of the paper, the results of the experimental campaign are shown to demonstrate the effectiveness
of the proposed control logic. |
| | Reference: | Follow-the-Leader control strategy for azimuth propulsion system on surface vessels. B. Piaggio, V. Garofano, S. Donnarumma, A. Alessandri, R.R. Negenborn, M. Martelli. In Proceedings of the 2020 International Ship Control Systems Symposium (iSCSS 2020), Delft, The Netherlands, October 2020. 12 pp. Open access. | | | Download: | open access |
|
|