|
| Title: | Platooning of automated ground vehicles to connect port and hinterland: A multi-objective optimization approach | | | Authors: | N. Pourmohammad-Zia, F. Schulte, D. Souravlias, R.R. Negenborn |
| | Conference: | 11th International Conference on Computational Logistics (ICCL'20) | | Address: | Enschede, The Netherlands | | Date: | September 2020 |
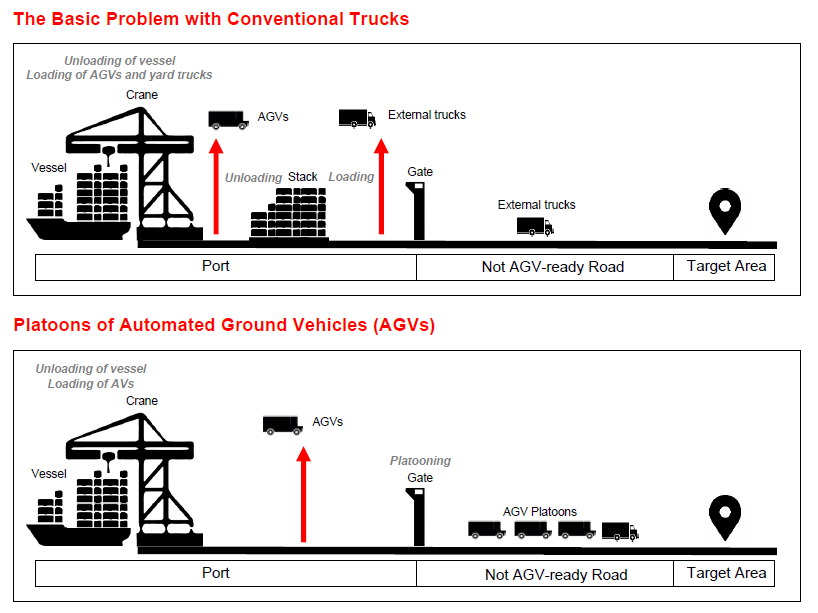
| | Abstract: | Automated ground vehicles (AGVs) are essential part of container operations at many ports. Forming platoons{as conceptually established in trucking may allow these vehicles to directly cater demand points such as dry ports in the hinterland. In this work, we aim to assess such AGV platoons in terms of operational efficiency and costs, considering the case of the Port of Rotterdam. We propose a multi-objective mixed-integer programming model that minimizes dwell and idle times, on the one hand, and the total cost of the system involving transportation, labor, and platoon formation costs, on the other hand. To achieve Pareto optimal solutions that capture the trade-offs between minimizing cost and time, we apply the augmented epsilon constraint method. The results indicate that all the containers are delivered by AGVs. This not only shortens the dwell time of the containers by decreasing loading/unloading processes and eliminating stacking but also brings considerable cost savings. |
| | Reference: | Platooning of automated ground vehicles to connect port and hinterland: A multi-objective optimization approach. N. Pourmohammad-Zia, F. Schulte, D. Souravlias, R.R. Negenborn. In Proceedings of the 11th International Conference on Computational Logistics (ICCL'20), Enschede, The Netherlands, pp. 428-442, September 2020. | | | Request: | A
copy of this publication. |
|
|