|
| Title: | Model predictive control for simultaneous planning of container and vehicle routes | | | Authors: | R.B. Larsen, B. Atasoy, R.R. Negenborn |
| | Journal: | European Journal of Control | | |
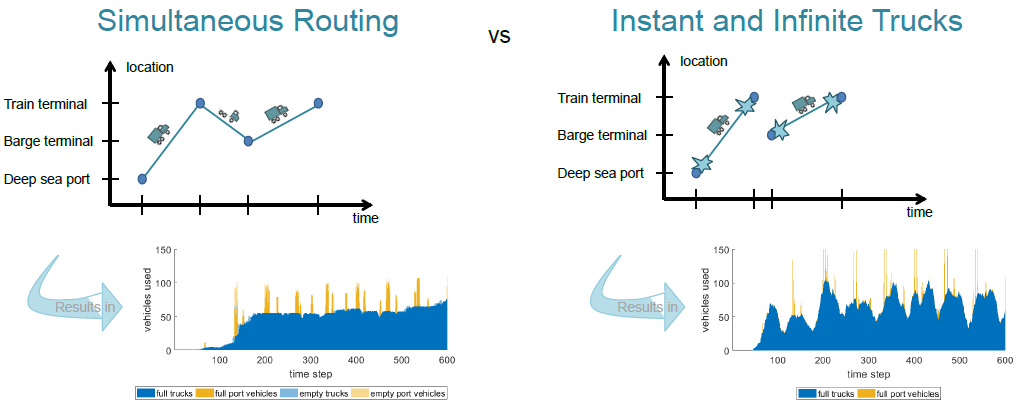
| | Abstract: | Transport of containers on a-modal bookings enables transport suppliers to route the containers in accordance with the current state of the synchromodal transport network. At the same time, it enables the transport providers to route their vehicles in real time based on the current need for transportation. The interdependency of the routes of containers and of vehicles has not yet been discussed explicitly in the synchromodal literature. This paper presents a model predictive controller that determines which combination of trucks, trains, and ships to use for transporting the containers and what routes empty and full trucks should use as one integrated problem. The impacts of this integrated problem as opposed to only considering the routes of the containers are shown with experiments on a simulated synchromodal hinterland network performed with both the proposed method and with a method that solely routes the containers. The results indicate an improved vehicle utilization. Furthermore, the integrated problem approach allows for more realistic constraints and costs. |
| | Reference: | Model predictive control for simultaneous planning of container and vehicle routes. R.B. Larsen, B. Atasoy, R.R. Negenborn. European Journal of Control, vol. 57, pp. 273-282, January 2021. | | | Request: | A
copy of this publication. |
|
|