|
| Title: | Predictive path following based on adaptive line-of-sight for underactuated autonomous surface vessels | | | Authors: | C. Liu, R.R. Negenborn, X. Chu, H. Zheng | | | | |
| | Abstract: | Underactuated autonomous surface vehicles (ASVs) have stringent requirements on automatically tracking a predefined path. This paper proposes a model predictive control (MPC) approach based on adaptive line-of-sight (LOS) guidance for path following of ASVs.
For the controller, a second order nonlinear Nomoto model with disturbances is proposed as the vessel dynamic motion model after reviewing and comparing different ship motion models applied for path following control. For the guidance system, a novel adaptive
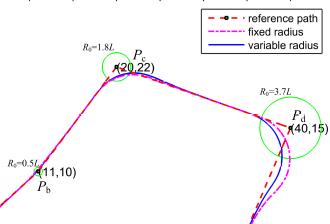
LOS guidance with a variable acceptance circle radius is proposed to improve the precision of reference path tracking. Specifically, the acceptance circle radius is adapted with the angle between two adjacent straight segments of a reference path. Simulation experiments illustrate that the LOS guidance system with a variable acceptance circle radius results in smaller tracking errors compared with the fixed acceptance circle radius. The proposed path following method can track reference paths well even in the face of disturbances. |
| | Reference: | | | | Request: | A
copy of this publication. |
|
|