|
| Title: | A state-compensation extended state observer for model predictive control | | | Authors: | C. Liu, R.R. Negenborn, H. Zheng, X. Chu | | | | |
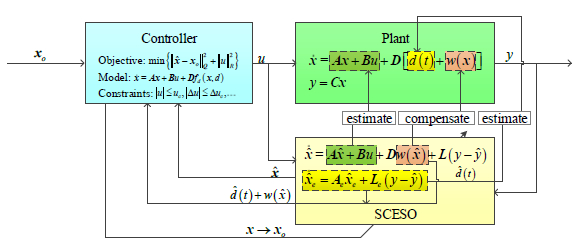
| | Abstract: | Motion control in absence of human involvement is difficult to realize for autonomous vessels because there usually exist environmental disturbances and unmeasurable states at the same time. A discrete-time model predictive control (MPC) approach based on a state-compensation extended state observer (SCESO) is proposed to achieve more precise control performance with state estimations and disturbance rejections simultaneously. The main idea is that lumped disturbances encompassing nonlinear dynamics and external disturbances are handled as two parts, unlike the standard extended state observer (ESO). Particularly, the nonlinear terms are compensated by estimated states and the external disturbances are considered as extended states and attenuated by the traditional ESO strategy. Assuming that the lumped disturbances are constant over the prediction horizon, the prediction model is linearized to save computational time since after linearization the online MPC optimization problems are solved as quadratic programming problems instead of nonlinear programming problems. The convergence of the proposed SCESO estimation errors to zero is proved even when the disturbances keep variable. Two case studies involving a numerical example and ship heading control have been conducted to verify the effectiveness of the proposed control method. |
| | Reference: | | | | Request: | A
copy of this publication. |
|
|