|
| Title: | Distributed nonlinear trajectory optimization for multi-robot motion planning | | | Authors: | L. Ferranti, L. Lyons, R.R. Negenborn, T. Keviczky, J. Alonso-Mora |
| | Journal: | IEEE Transactions on Control Systems Technology | | |
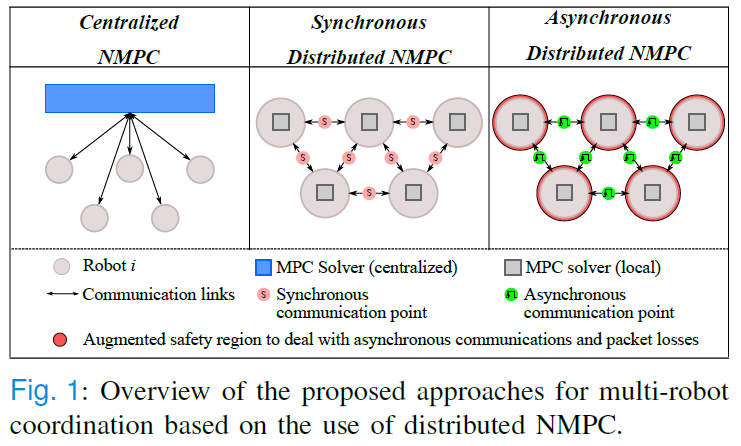
| | Abstract: | This work presents a method for multi-robot coordination based on a novel distributed nonlinear model predictive control formulation for trajectory optimization and its modified version to mitigate the effects of packet losses and delays in the communication among the robots. Our algorithms consider that each robot is equipped with an on-board computation unit to solve a local control problem and communicate with neighboring autonomous robots via a wireless network. The difference between the two proposed methods is in the way the robots exchange information to coordinate. The information exchange can occur in a (i) synchronous or (ii) asynchronous fashion. By relying on the theory of the nonconvex alternating direction method of multipliers, we show that the proposed solutions converge to a (local) solution of the centralized problem. For both algorithms, the communication exchange preserves the safety of the robots, that is, collisions with neighboring autonomous robots are prevented. The proposed approaches can be applied to various multi-robot scenarios and robot models. In this work, we assess our methods, both in simulation and with experiments, for the coordination of a team of autonomous vehicles in (a) an unsupervised intersection crossing and (b) a platooning scenarios. |
| | Reference: | Distributed nonlinear trajectory optimization for multi-robot motion planning. L. Ferranti, L. Lyons, R.R. Negenborn, T. Keviczky, J. Alonso-Mora. IEEE Transactions on Control Systems Technology, vol. 31, no. 2, pp. 809-824, 2023. | | | Request: | A
copy of this publication. |
|
|